███ Gw-Basic e Turbo Basic (Per scaricare File Scarica)
---------------------------------------------------------------------------------- La Porta parallela gestita dal Basic -------------------------------------------------------------------------------------
Per non dimenticare il passato cerchero`di illustrare alcune esperienze fatte negli anni 1984-90 quando il Pc era utilizzato quasi esclusivamente come macchina per contabilita`.In quel periodo si poteva disporre del Manuale Dos e GW-Basic altro quasi nulla.Unica vera possibilita`era far funzionare la fantasia. Spero che qualcuno in soffitta si ritrovi un Pc Pentium 2 in su con Porta parallela Le varie istruzioni saranno in Gw-Basic facilmente traducibili in altro linguaggio , comunque compatibile con Turbo Basic .Va escluso il Dos di Xp .
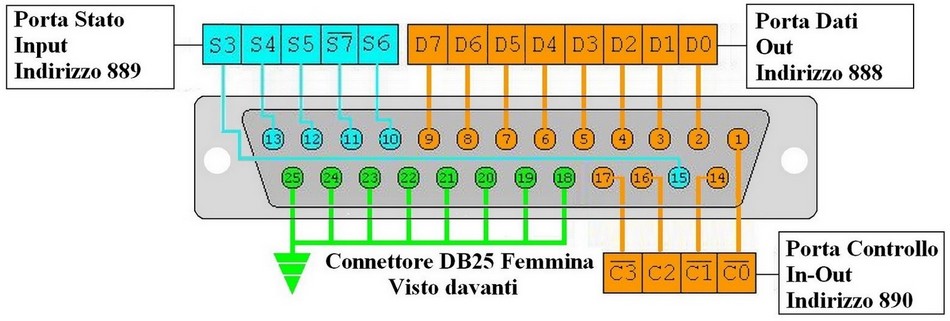


Credo che scrivere un trattato per la porta non valga la pena ,va vista come un quadretto elettrico dove sono collegati 12 fili che portano all`esterno una tensione di 5 Volt e altri 5 fili dove si manda all`intero una tensione .Buono e' che questi quadretti possono essere tre quindi di fili da muovere ce ne sono abbastanza.Un altro aspetto interessante e' il costo irrisorio ma sopratutto il piacere di far muovere oggetti , allestire alberi di natale ,antifurti controllare antenne ,accordare antenne ,costrursi una bobinatrice ecc. basta un po'di fantasia .Da non scartare e' la possibilita' di registrare qualunque posizione per avere a portata di mano l`evento registrato e ripetere l`operazione con precisione.Unico inghippo e' il Pc tra i piedi con tutti i fili che escono.Per i calcoli basta pochissimo esiste solo 1 e 0 , 1 per Led acceso 0 per Led spento.Per quelli come me che non hanno studiato i calcoli li fanno con i numeri normali i piu' bravi in binario.La cosa interessante da sapere e`a quale filo dare o togliere tensione e il nome del filo. Il Peso il valore numerico del bit es. 2^0=1 D0=1 - 2^7=128 D7=128 , la porta con massimo 8 bit , i numeri andranno fino a 255.Facendo un OUT 888,255 avendo 8 led collegati sui pin da 2 a 9 si accenderanno tutti ,con OUT 888,0 si spegneranno.Fine trattato porta parallela.La Tabella 1 descrive lo stato che presenta la parallela quando e' resettata .Non e' cosi quando si accende il Pc ,si trovano diverse condizioni , dipende dalla macchina.E' bene resettarla quando viene utilizzata per uso obbistico essendo abbastanza delicata.Essa presenta tre porte distinte 8 bit per la porta Dati out , la porta di Stato con 5 bit disponibili in input da D3 aD7 e la porta di Controllo con 4 bit out da D0 a D3 , non sempre e' bidirezionale . Le tre uscite D0 D1 D3 dopo il reset rimangono alte quindi sui pin 1-14-17 si trova una tensione di 5 Volt.Per portare a zero questi tre pin la soluzione piu' semplice e' di cambiare la condizione di reset e avere la sequenza 1 2 4 8 con pesi diversi .Nella tabella 2 si trovano i pesi modificati quindi per per mandare alto i1 pin N.1 non si scrivera' OUT 890,1 ma OUT 890,10 il reset sara' OUT 890,11.Spenderei due parole su come mai ,cambiare la condizione .Essendo D0 D1 D3 alti il loro peso totale e' di 1+2+8=11 questo peso va riportato a zero con OUT 890,11 anche se in realta' guardando lo stato della porta questi tre bit sono alti ma sul connettore sono bassi . Si prenda come esempio quattro led nella condizione iniziale led1 led2 led4 sono accesi led3 spento. Per avere il solo Led1 acceso vanno spenti Led2 Peso=2 e Led4 Peso=8, la somma sara' 2+8=10 , ecco che inviando alla porta con OUT 890,10 i Led2 e 4 si spengono lasciando acceso Led1. Mantenendo la condizione iniziale i tre Led 1 2 4 accesi e Led3 spento va lasciato acceso solo Led2, spegnendo Led1 Peso=1 Led4 Peso=8 , la somma sara' 1+8=9 , la terza condizione comporta lo spegnimento dei Led 1 2 4 e l` accensione di Led3 sara'la somma di tutti i pesi 1+2+4+8=15 i pesi 1+2+8 spengono , mentre peso 4 accende Led3 , per Led4 Peso=8 andranno spenti Led1 Peso=1 e Led2=Peso2 , 1+2=3 .La sequenza Pesi 1 2 4 8 verra' sostituita da 10 9 15 3 .A questo punto il nostro quadretto elettrico e' pronto con 12 interrutori interni e 5 esterni. Basta premere quello giusto.

-Clik-
███ Scarica Utilita' Gestione Porta Parallela
Per portare all'esterno i segnali si puo'costruire su basetta millefori una schedina sulla quale mettere un regolatore di tensione a 5 Volt 12 Led 22 Morsetti le cinque resistenze sui Pin d'entrata ( non sempre necessarie )ai quali si potranno collegare future interfacce da provare .Nella figura non sono presenti , per maggiore sicurezza tra connettore e ingressi morsettiera si possono interporre 12 fotoaccoppiatori per isolare la porta dall'esterno.( con un po' di attenzione non servono ).L`interfaccia da porre tra Pc e l`esterno e' un semplice amplificatore di corrente.Questa interfaccina costruita con materiali di recupero e` operativa dal lontano 1990 o prima,e' forse un po'piu' laboriosa ma offre la possibilita' di utilizzare motori con diversa tensione di alimentazione . Con motori da 3-4 A il raffreddamento deve essere adeguato,va ricordato che a mezzo passo il consumo e' bene sia considerato il doppio. Il valore dei componenti sono uguali per le quattro fasi .La taratura delle 4 Vr1 : Collegare il motore, mettere un Amperometro in serie al Positivo di alimentazione,far uscire un bit per volta e ruotare la Vr1 relativa per l'assorbimento richiesto.Rispettare il collegamento alla parallela Pin 2-3-4-5 - 6-7-8-9 - 1-14-16-17 . Il diodo e bene sia veloce ,piuttosto che niente metterne uno della serie 1N4000 Prima di collegare il motore verificare la corretta accensione dei led.


La differenza tra motore 5-6-8 fili :
8 fili = non hanno comune collegato L1 - L4 sono libere (e`utilizzabile sia Unipolare che Bipolare)
6 fili = sono collegate Comune - L1 - L2 Comune L3 - L4 i due comuni vanno collegati assieme
5 fili = un solo comune

I colori dei fili non sono unificati ,vanno individuati.
1 ) Cercare il comune usando il tester come ohmmetro. Mantenendo fermo un puntale
su un filo, spostare l`altro sui restanti fili , va trovata la minore resistenza .
Es. I colori sono Rosso,Blu,Arancio,Verde,Nero.Se tra Rosso e Blu ci sono 10 ohm
mentre tra Rosso e Nero ci sono 5 ohm , il Nero sara` il comune.( morsetto 3 )
Escludendo il comune testando gli altri si avranno sempre 10 ohm.
4 ) Per trovare la fase A-B-A1-B1 vanno alimentati .Se la fase non e`corretta la rotazione sara`
incerta e tremolante.Questa prova e` bene sia fatta con una rotazione piuttosto lenta .
a ) Connettere il comune sul + Alimentazione dell`interfaccia.
b ) Inserire a caso i quattro fili A-B-A1-B1 nei morsetti 1-2-4-5.
c ) Mandare la sequenza 1 2 4 8 dalla parallela con apposito programma .
d ) Se la sequenza non e` corretta invertire fili B1 con A1 , serrare i morsetti .
e ) Se la sequenza non e`ancora corretta invertire A1 con B, la fase e`finita .
f ) Qualora la rotazione fosse Antioraria invertire A con A1 .
5 ) Nella figura il senso di rotazione e`Orario,verra` utilizzato nei programmini.
-Clik-
███ Tre Programmini Didattici per Motore P/Passo
███ Bobinatrice con Motori P/Passo (Guida Filo proporzionale)


10 '---------------------Gestione Encoder Riga ottica---------------------------
20 ' collegare l'encoder PIN 15 Avanti PIN 13 Indietro
30 CLS:KEY OFF
40 PORT=888
50 X=INP(PORT+1) AND 24 'legge i bit 4+5 encoder No.1
60 W$=INKEY$:IF W$=CHR$(27) THEN CLS:OUT PORT,0:END
70 IF CONTROLLO=0 THEN X=24 :CONTROLLO=1 'serve alla partenza
80 IF X=16 THEN AVA=1 'pin 15 bit n.4 (quando si trova a 0 x=16) 24-8=16
90 IF X=8 THEN IND=1 'pin 13 bit n.5 (quando si trova a 0 x=8 ) 24-16=8
100 IF X=24 THEN 110 ELSE 50 'varia la lettura quando i bit 4 e 5 sono a 1
110 DISPLAY=DISPLAY+AVA-IND : AVA=0 : IND=0
120 LOCATE 12,40:PRINT DISPLAY
130 GOTO 50
 Antenna Loop gestita da un motore passo passo con registrazione della sintonia .
Antenna Loop gestita da un motore passo passo con registrazione della sintonia .
L'azzeramento del condensatore variabile e' affidato ad un microinterrutore , nulla vieta
di utilizzare una fotocellula con uscita a zero ,mentre il fine corsa verra' scritto in un file.
La parte che merita piu' attenzione e' il fissaggio del micro, la cam posta sull'albero motore,
il giunto tra motore e condensatore variabile e' bene abbia una certa elasticita' per attenuare
i passi a bassa velocita' e isolare il motore dal variabile. I programmini riguarderanno :
L'allineamento del micro , la verifica della massima escursione del variabile con o senza
demoltiplica, variabile speciale a scorrimento.La velocita' di spostamento e' relativa al Pc
utilizzato e dovra' essere valutata correggendo il temporizzatore nel programma.La fase di
partenza del motore e' in Senso Orario.I programmi sono suddivisi in due parti ,il primo
dedicato alla messa a punto dell'escursione del condesatore variabile mentre il secondo
prevede la registrazione della posizione con movimento continuo avanti/indietro e sintonia
fine con avvanzamento a passo singolo ,sono previste 75 posizioni a video per il Load.
Come Utilita' : La correzione e la cancellazione totale delle registrazioni
Si possono collegare un massimo di tre motori indipendenti Motore1 Pin 2 3 4 5 + Micro1
Pin 12-Massa Motore2 Pin 6 7 8 9 + Micro2 Pin 13 Motore3 Pin 1 10 11 12 14 + Micro3
Pin 15 e massa.L`operazione preliminare per ogni singolo motore sara' quella di stabilire
Azzeramento e Finecorsa .Il condensatore variabile va lasciato scollegato.
Es. se si usa Motore1 esso andra'collegato ai Pin 2 3 4 5 messo in fase per ruotare in
senso Orario ,la seconda operazione e verificare la chiusura del Micro verso massa da effettuare
manualmente ruotando in senso orario l'albero del motore fin che la camma chiuda il micro, questo evento verra' segnalato da un Beep.(fermarsi subito) Naturalmente verra' bloccato il condensatore variabile all'albero del motore nella condizione di operare in senso Antiorario.Fatto questo premere Esc , le opzioni 1 e 2 solo per motori 200 step/giro la 1 va usata quando il condensatore variabile ha i blocchi a inizio/fine la 2 per condensatori variabili senza blocchi ed escursione di 180 Gradi , la terza fino a un massimo di 999.999 microstep.Fatta la scelta il programma provvede lo sgancio del micro e questo sara' Azzeramento Ok.Con premi un tasto salvo l'opzione 2 che fara' ruotare di 180 Gr. il motore per fermarsi automaticamente , le altre due il motore andra' fermato quando si riterra' di aver raggiunto il Finecorsa.Questo dato verra' registrato nel file F-Corsa.dat .
███ Scarica Programmi Loop

10 '---------------------Gestione Encoder Riga ottica---------------------------
20 ' collegare l'encoder PIN 15 Avanti PIN 13 Indietro
30 CLS:KEY OFF
40 PORT=888
50 X=INP(PORT+1) AND 24 'legge i bit 4+5 encoder No.1
60 W$=INKEY$:IF W$=CHR$(27) THEN CLS:OUT PORT,0:END
70 IF CONTROLLO=0 THEN X=24 :CONTROLLO=1 'serve alla partenza
80 IF X=16 THEN AVA=1 'pin 15 bit n.4 (quando si trova a 0 x=16) 24-8=16
90 IF X=8 THEN IND=1 'pin 13 bit n.5 (quando si trova a 0 x=8 ) 24-16=8
100 IF X=24 THEN 110 ELSE 50 'varia la lettura quando i bit 4 e 5 sono a 1
110 DISPLAY=DISPLAY+AVA-IND : AVA=0 : IND=0
120 LOCATE 12,40:PRINT DISPLAY
130 GOTO 50
--------------------------------- Loop Magnetico con motore P/Passo----------------------------------

L'azzeramento del condensatore variabile e' affidato ad un microinterrutore , nulla vieta
di utilizzare una fotocellula con uscita a zero ,mentre il fine corsa verra' scritto in un file.
La parte che merita piu' attenzione e' il fissaggio del micro, la cam posta sull'albero motore,
il giunto tra motore e condensatore variabile e' bene abbia una certa elasticita' per attenuare
i passi a bassa velocita' e isolare il motore dal variabile. I programmini riguarderanno :
L'allineamento del micro , la verifica della massima escursione del variabile con o senza
demoltiplica, variabile speciale a scorrimento.La velocita' di spostamento e' relativa al Pc
utilizzato e dovra' essere valutata correggendo il temporizzatore nel programma.La fase di
partenza del motore e' in Senso Orario.I programmi sono suddivisi in due parti ,il primo
dedicato alla messa a punto dell'escursione del condesatore variabile mentre il secondo
prevede la registrazione della posizione con movimento continuo avanti/indietro e sintonia
fine con avvanzamento a passo singolo ,sono previste 75 posizioni a video per il Load.
Come Utilita' : La correzione e la cancellazione totale delle registrazioni
Si possono collegare un massimo di tre motori indipendenti Motore1 Pin 2 3 4 5 + Micro1
Pin 12-Massa Motore2 Pin 6 7 8 9 + Micro2 Pin 13 Motore3 Pin 1 10 11 12 14 + Micro3
Pin 15 e massa.L`operazione preliminare per ogni singolo motore sara' quella di stabilire
Azzeramento e Finecorsa .Il condensatore variabile va lasciato scollegato.
Es. se si usa Motore1 esso andra'collegato ai Pin 2 3 4 5 messo in fase per ruotare in
senso Orario ,la seconda operazione e verificare la chiusura del Micro verso massa da effettuare
manualmente ruotando in senso orario l'albero del motore fin che la camma chiuda il micro, questo evento verra' segnalato da un Beep.(fermarsi subito) Naturalmente verra' bloccato il condensatore variabile all'albero del motore nella condizione di operare in senso Antiorario.Fatto questo premere Esc , le opzioni 1 e 2 solo per motori 200 step/giro la 1 va usata quando il condensatore variabile ha i blocchi a inizio/fine la 2 per condensatori variabili senza blocchi ed escursione di 180 Gradi , la terza fino a un massimo di 999.999 microstep.Fatta la scelta il programma provvede lo sgancio del micro e questo sara' Azzeramento Ok.Con premi un tasto salvo l'opzione 2 che fara' ruotare di 180 Gr. il motore per fermarsi automaticamente , le altre due il motore andra' fermato quando si riterra' di aver raggiunto il Finecorsa.Questo dato verra' registrato nel file F-Corsa.dat .
-Clik-